Funded Projects
EPSRC
GAIA
Ground-Aerial maps Integration for increased Autonomy outdoors
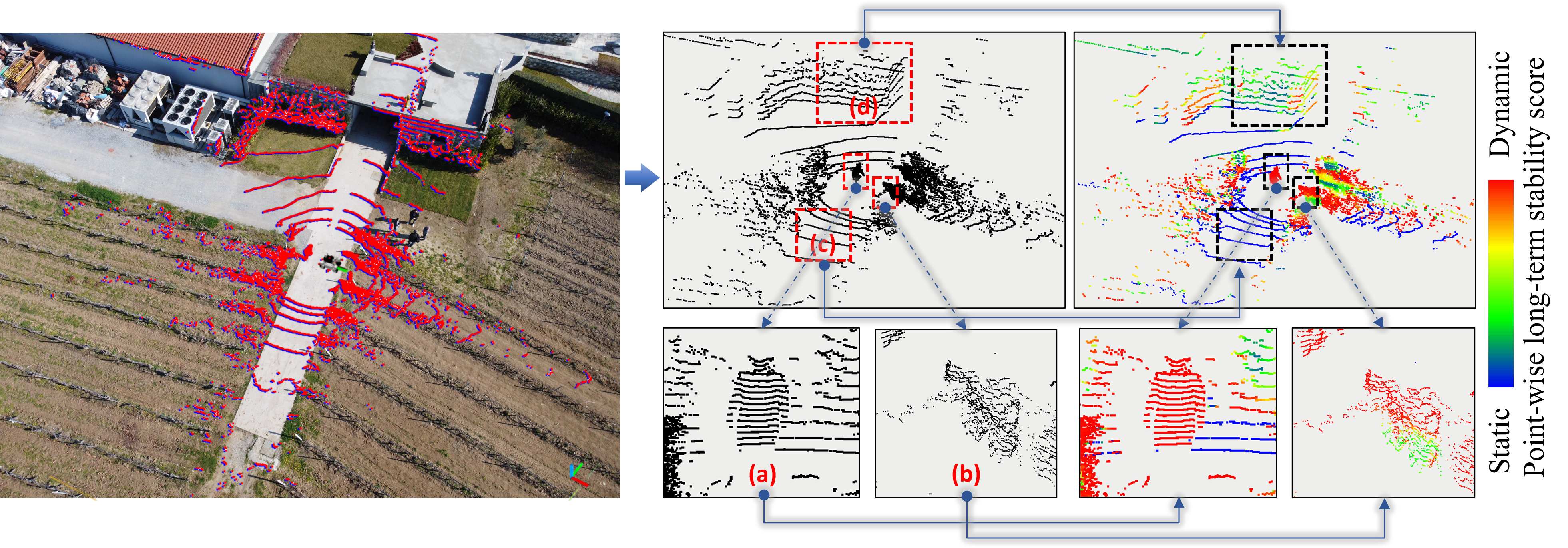
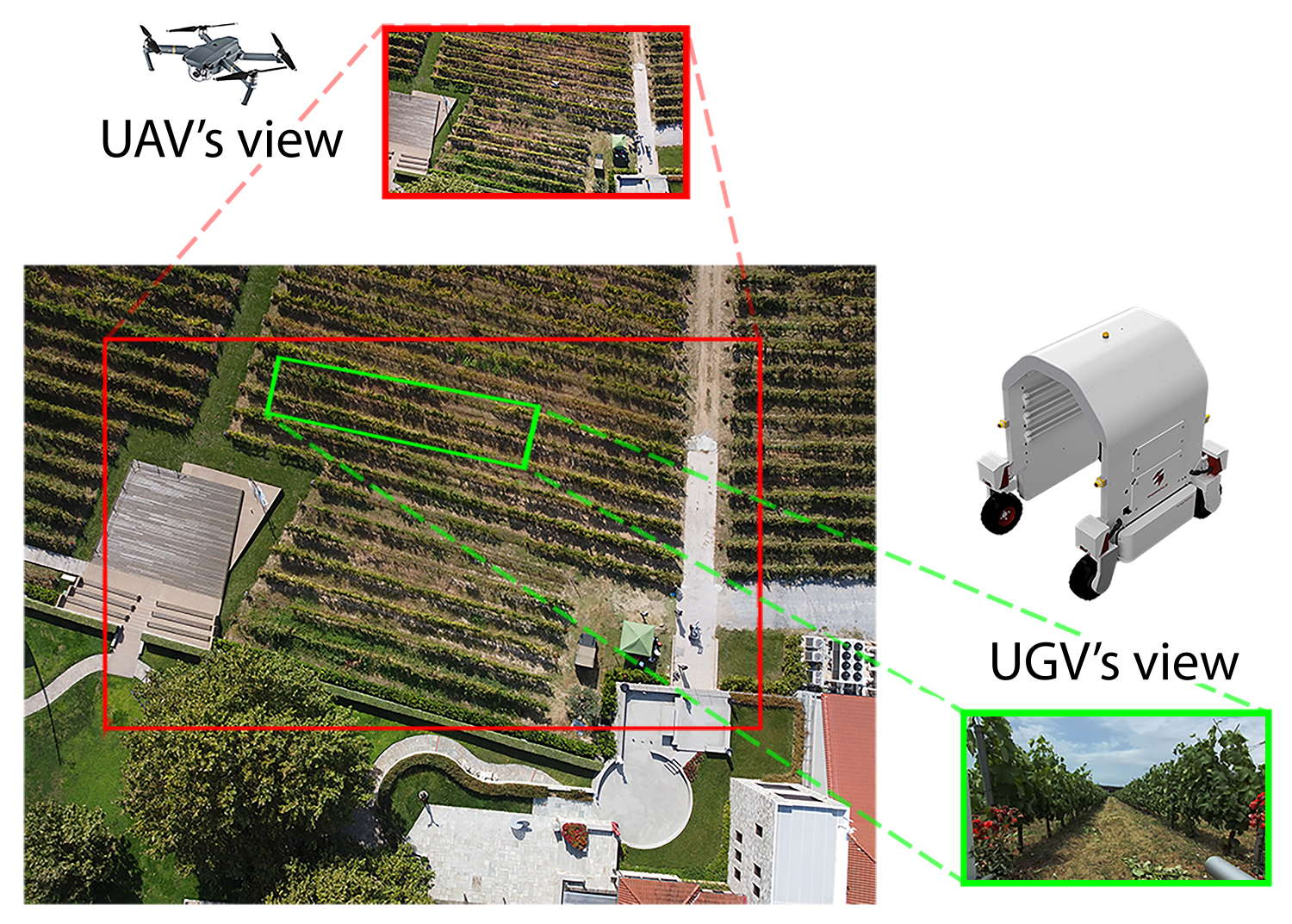
GAIA focuses on multi-robot mapping for agriculture, fusing aerial and ground sensor data to enable fully autonomous robots in complex, dynamic environments. In collaboration with TU Delft, University of Bonn, and ETH Zurich.
Team: Rajitha De Silva (Postdoc), Marija Popovic (TU Delft PI)
InnovateUK
VISTA
Vineyard Information System for Technology and Automation
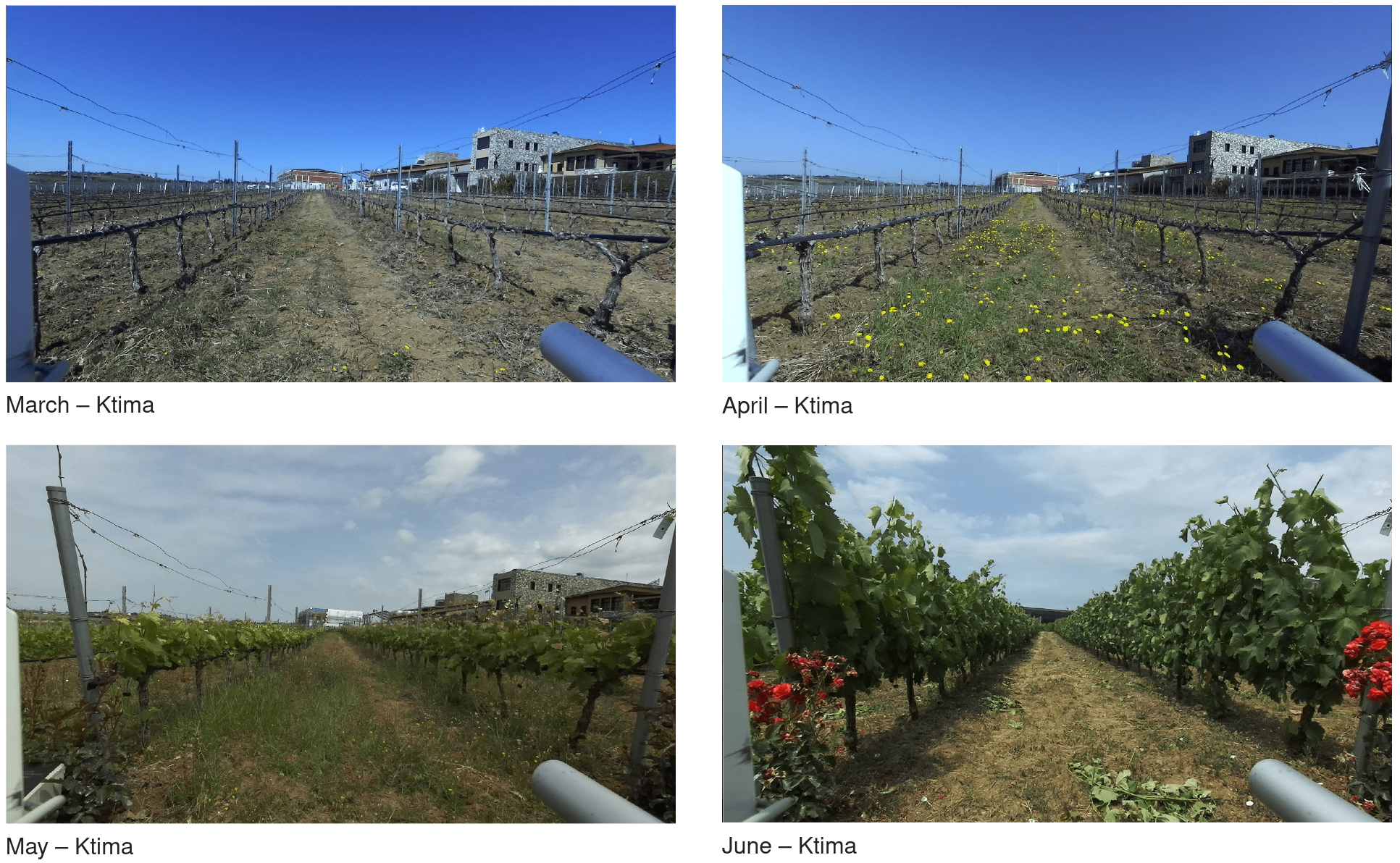
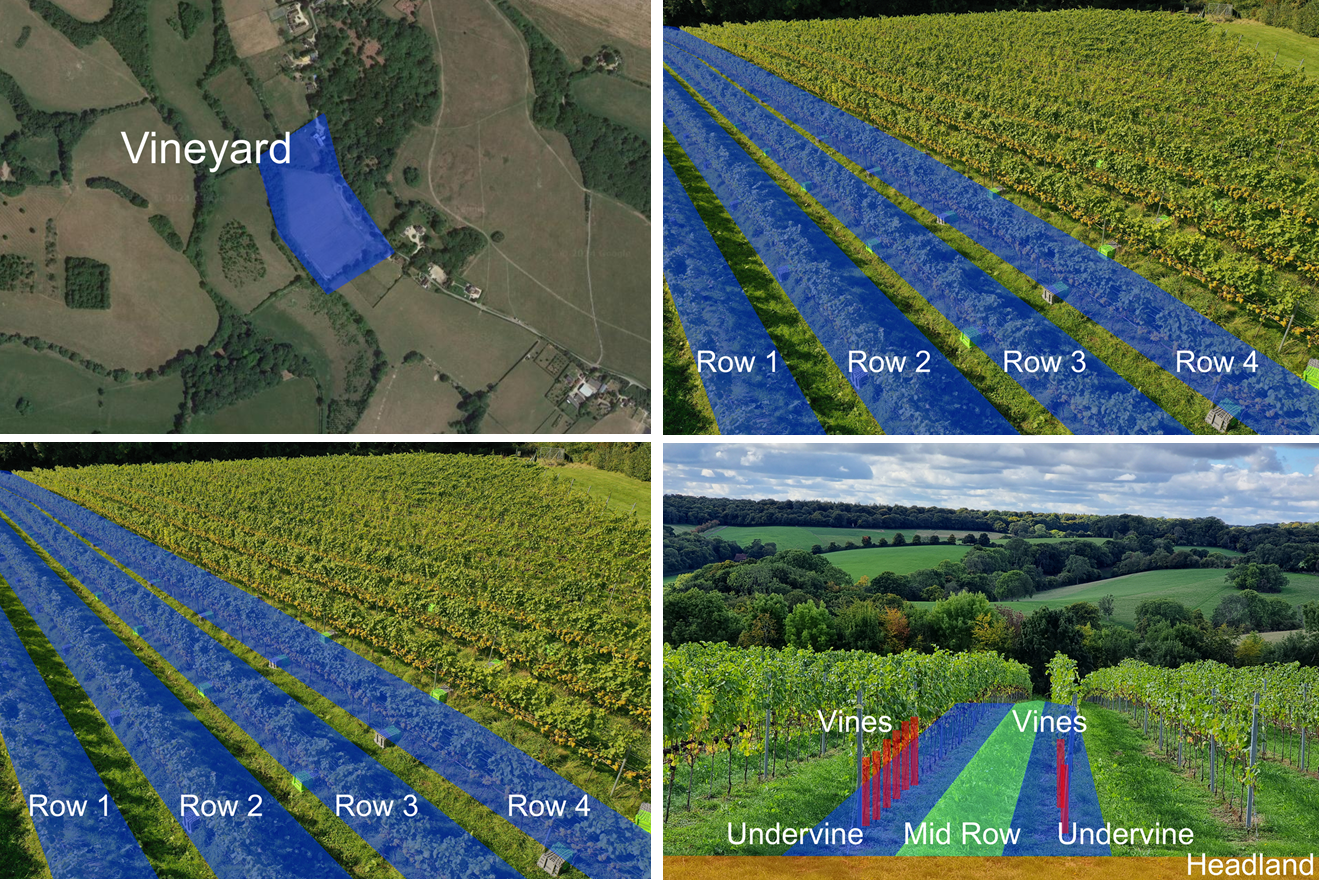
VISTA develops open standards for vineyard data management, integrating drones, ground robots, and handheld sensors into a unified digital twin to support precision viticulture and environmental decision-making.
Team: Jonathan Cox (Postdoc)