Projects
LCASTOR: The Lincoln Centre for Autonomous Systems's Robocup Team
Contribution:
- Autonomous Navigation and Mapping
- Sponsors recruitment
- Students mentoring
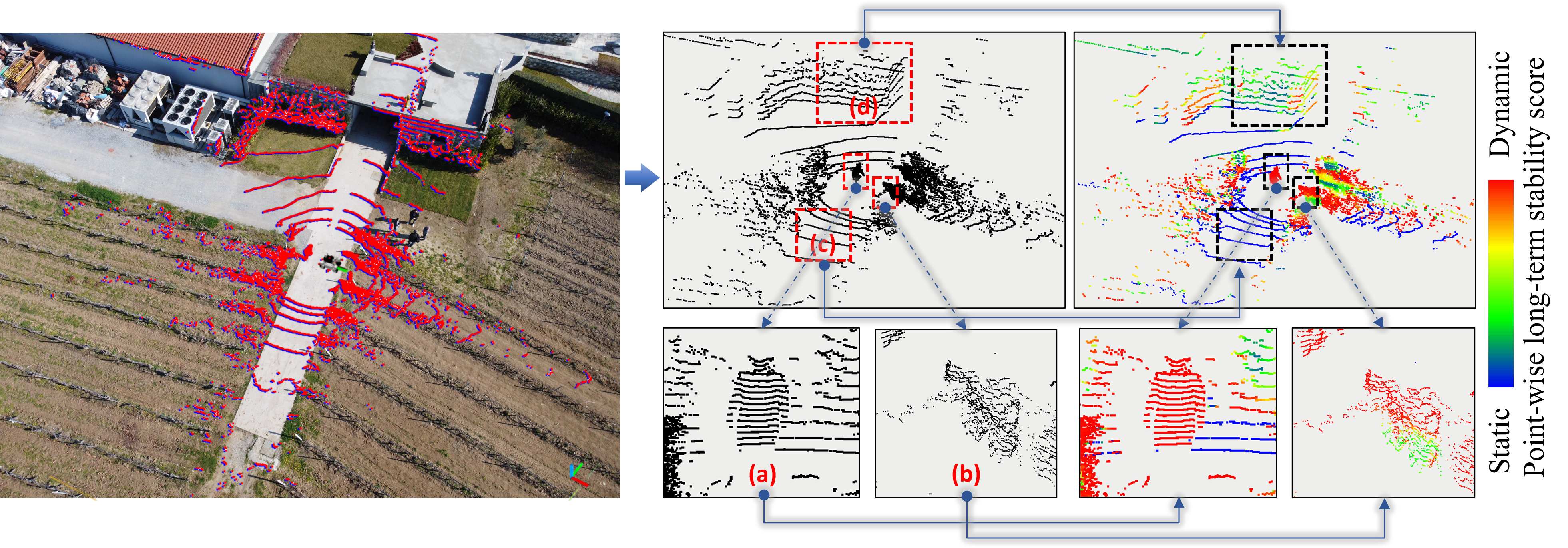
Exploiting long-term stable features in the agricultural domain
Contribution:
- Unsupervised point-wise labelling of LIDAR frame
- Regression network to learn and infer 3D LiDAR points long-term motion status
- Long-term localization performance by exploiting previous knowledge and stable points
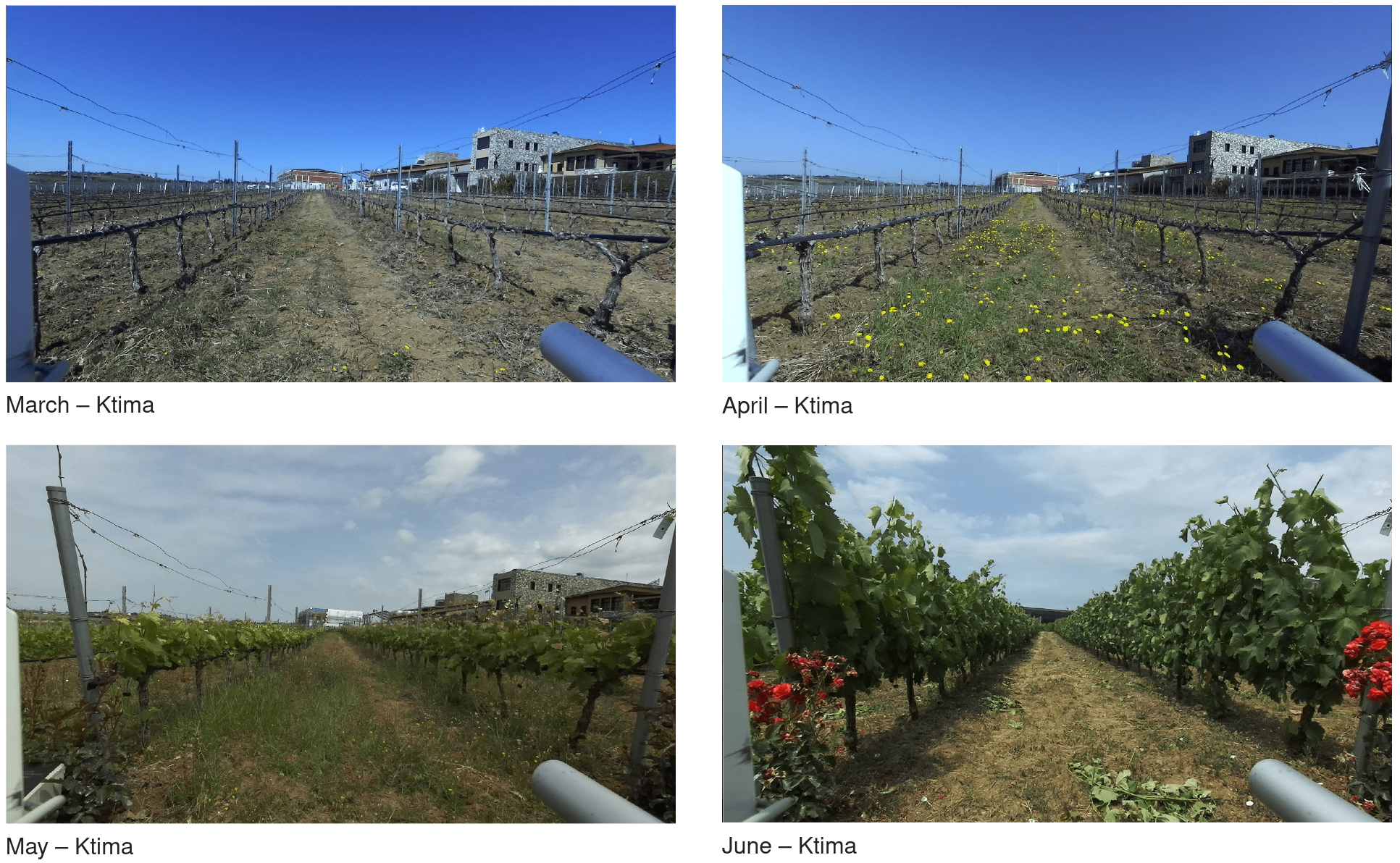
BLT Dataset: acquisition of the agricultural Bacchus Long-Term Dataset with automated robot deployment
Contribution:
- Robust and reproducible navigation plan for data recording
- Efficient data recording and saving pipeline
- 4D dataset for SLAM application in agricultural domain
Navigate-and-Seek: a Robotics Framework for People Localization in Agricultural Environments
Contribution:
- Topological Particle Filter
- Adoption of NBS for reducing the uncertainty on humans's location
- Evaluation on a digital twin of the real world scenario
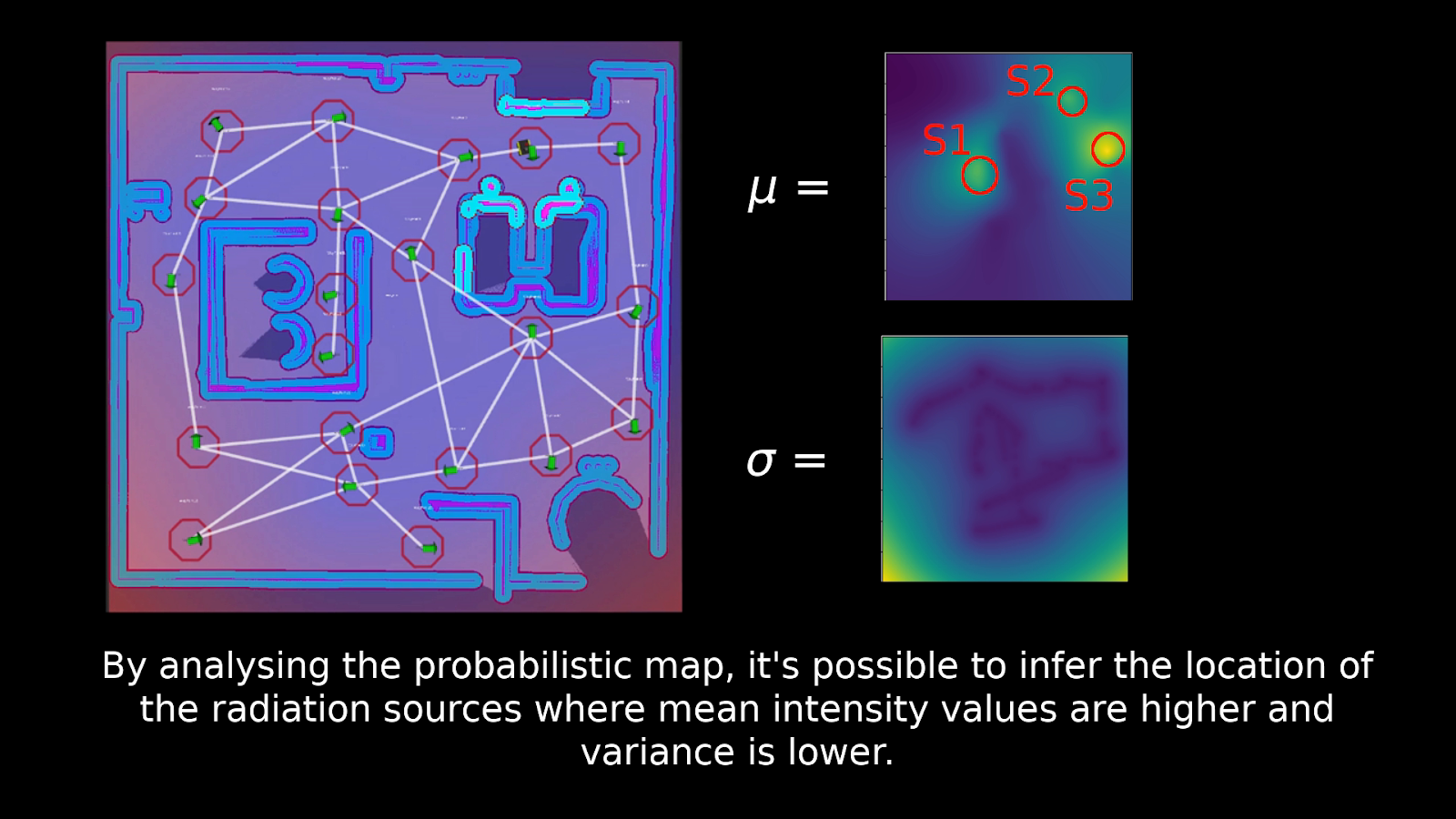
Radiation mapping and source localization using a mobile robot and a topological map
Contribution:
- Gaussian Process interpolates sensor reading to obtain probabilistic map
- Graph-based navigation
- Adoption of NBS for modifying robot behavior (attraction/repulsion)
Tracking of moving objects based on RFID technology
Contribution:
- Multi-Criteria Optimization problem
- Probabilistic sensor model
- Balanced performance: fast map coverage, reduced travel distance, high tag localization precision
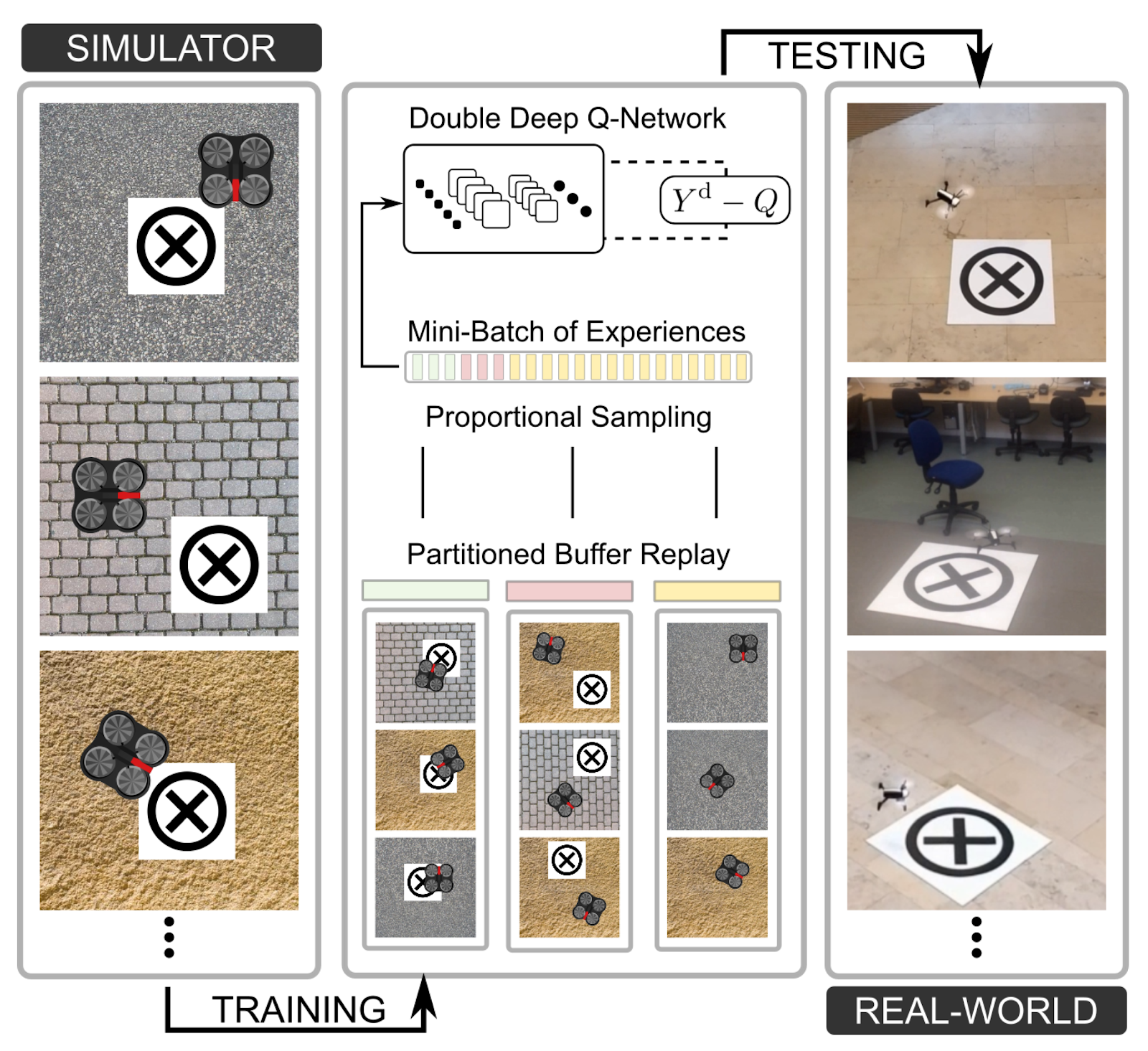
Autonomous UAV Landing with Deep Reinforcement Learning
Contribution:
- Autonomous control based only on raw pixels (low-resolution gray scale images)
- Sim-to-real
- Human-level performance
A Next-Best-Smell Approach for Gas Detection with a Mobile Robot
Contribution:
- Multi-Criteria decision making
- Online planner
- Scalable to multiple criteria