News

The LCASTOR team is qualified for RoboCup 2024!
For the second year in a row, our LCASTOR team achieved a successful qualification at the major robot competition. This year, the event will be held in the beautiful city of Eindhoven, Netherlands. We are looking forward to showcasing our latest research. A video about our qualification can be found on Youtube.
Invited talk at Sheffield Hallam University
On the 1st of December 2023, I have been invited to give a talk as part of the Engineering Innovation: Unveiling the Future seminar series, at the Sheffield Hallam University. A recording of my 45-minutes long monologue on mobile autonomy in the field is available on Youtube.


I have been promoted Senior Lecturer
Following a very successful year in teaching and research, culminated with the award of two major research grants, I have been appointed Senior Lecturer at the University of Lincoln.
Keep up doing cool amazing job! 💪🏻
The LCASTOR team in Bordeaux!
Our team had a blast at our first appearance at the RoboCup 2023 in Bordeaux! We were able to demonstrate our latest research in autonomous navigation and mapping, people tracking and following, and human language understanding. More information about our experience can be found on the blog post written by Alex..

New EPSRC grant: GAIA
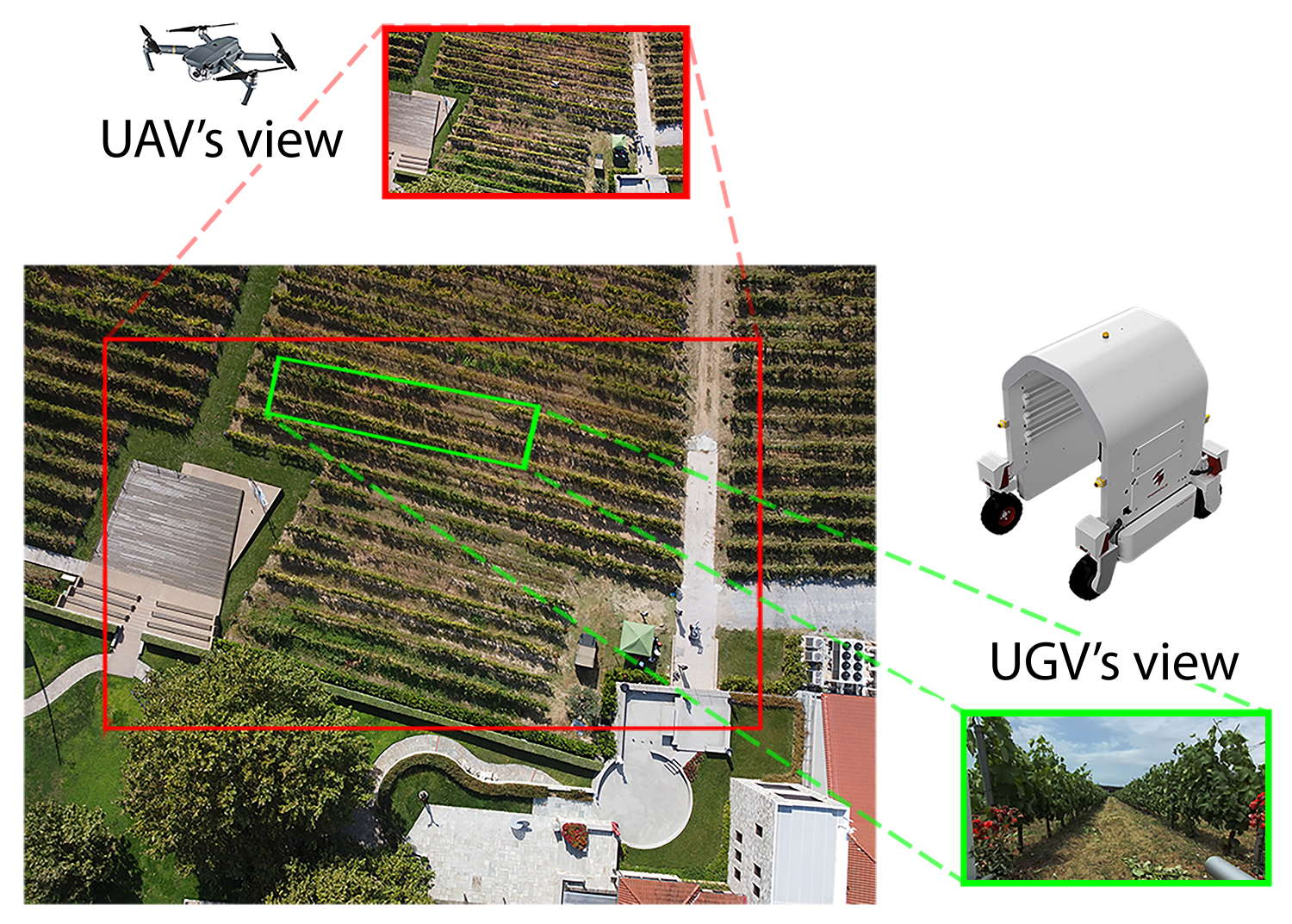
There is a growing demand for multi-robot mapping in applications like site inspection and agriculture. As such, there is a need for communication among robots to share information and create a comprehensive view of the environment. Existing methods for integrating maps from multiple robots face challenges, especially with fleets of diverse robots. The GAIA (Ground-Aerial maps Integration for increased Autonomy Outdoors) project aims to tackle these challenges by leveraging human understanding to integrate multi-perspective robotic maps. In agriculture, autonomous robots assist in tasks like monitoring and harvesting, with ground robots providing detailed inspections and UAVs offering wide-area observation. The project focuses on precision agriculture, where robotics can revolutionize practices. UAVs actively sense and update maps, improving efficiency by mapping obstacles and aiding ground platform deployment. Overall, the project aims to enhance autonomy outdoors through integrated mapping solutions. This project is an international collaboration with the Marija Popovic (UT Delft), Cyrill Stachiss (University of Bonn), and Cesar Cadena (ETH Zurich).
New InnovateUK grant: Vineyard Information System for Technology and Automation
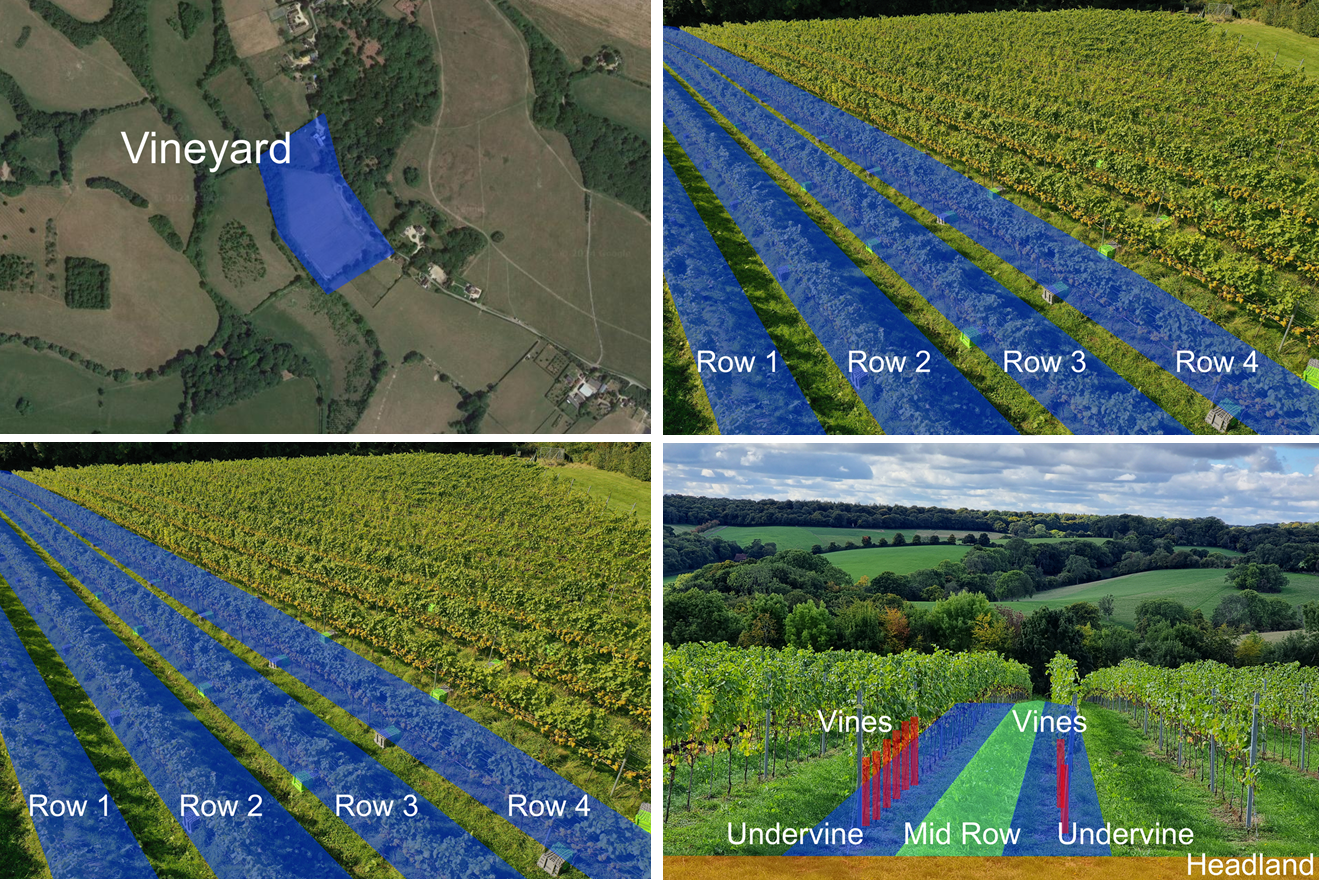
A new project, funded by Defra's Farming Innovation Programme and UKRI's Transforming Food Production Challenge, aims to create an open standard for digital maps of vineyards. The project is called Vineyard Information System for Technology and Automation, or 'VISTA'. The project is led by a consortium of leading industry partners and researchers from various fields. The VISTA map will provide the digital backbone to process data collected by drone, robot and in-field sensors. The data will include information on climate and weather, crop health, soil moisture, fruit counts, and fruit quality. The VISTA map will also enable valuable decision-making support for vineyard production, such as precision spraying and pre-harvest yield estimation. The project will demonstrate the use of the map for these two applications in the second year of the project. The project hopes to show the benefits of a flexible, high resolution mapping standard for farms worldwide and explore more applications in the future.

Lecturer in Robotics and Autonomous Systems
From September 2022, I'm happy to share that I'm starting a new position as a Lecturer (Asst. Professor) in Robotics and Autonomous Systems at the University of Lincoln!
The past 4 years have been fabulous while being part of the Lincoln Centre for Autonomous Systems (L-CAS), I've learnt a lot while working on cutting-edge technologies. It's such a fantastic place where to work to the point I've decided to remain as a full-time academic!
New Postdoc position in BACCHUS
Starting from April 2021, I am one of the Postdocs in Lincoln for the H2020 BACCHUS project, involving multiple partners across the European continent. My duties involve researching new localization solution for out-door long-term navigation, while comprising spatial and temporal constraints.


Finally a PhD
In September 2019, I officially graduated and attended the graduation ceremony at my old institution, the University of Plymouth.
New PostDoc at Lincoln Centre for Autonomous Systems
Following the submission of my PhD dissertation, I moved to Lincoln as new research fellow in the "National Centre for Nuclear Robotics". Academic partners of the projects comprise University of Birmingham, Edinburgh, Bristol, Essex, Lancaster and Queens Mary in London. My objective is developing new navigation and recovery strategies for a mobile robot using deep reinforcement learning.

MarineUAS winter school in Porto
In January 2018, I spent two weeks in Oulu to improve my knowledge about robotics systems and marine applications. The focus of the event was mainly related to establish international collaboration with research fellows in the same field. In the workshop session, together with my group I implemented a collision-free navigation algorithm for drones in a 3D environment.
Eurathlon/TRADR summer school in Oulu
In the summer of 2016, I spent one week in the beautiful Oulu (Finland) as participant of a summer school focus on heterogeneity in multi-agent systems. Here, I improved my skills in developing software and controlling both ground and aerial unmanned vehicles.


Secured a PhD position in Plymouth, UK
I am going to live for the next three years in Plymouth, just at the beginning of the beautiful Cornwall. As a PhD student of the Autonomous Marine Systems research group, I will study how to combine a flying drone with an autonomous boat in order to increase the overall awareness of the surrounding environment.
MSc in Computer Engineering
In September 2015, after be back from Sweden, I successfully defended my MSc thesis in front of a committee at my university, the Politecnico di Milano. This represents the end of a long but beautiful trip lasted 5 years.

Placement at the Mobile Robotics Lab - Orebro Universitet
Between March and July 2015, I moved to Sweden to complete my MSc dissertation. I was guided by Dr. Erik Schaffernicht and Prof. Achim Lilientham (with remote supervision of my Italian advisor, Prof. Francesco Amigoni). I developed an implemented an online navigation algorithm for Gasbot, a mobile robot equipped with a remote gas sensor. The goal of this work was to have efficient navigation strategies to identify all the methane leak sources in a given environment.